Hidden path inference
A T=10000 long
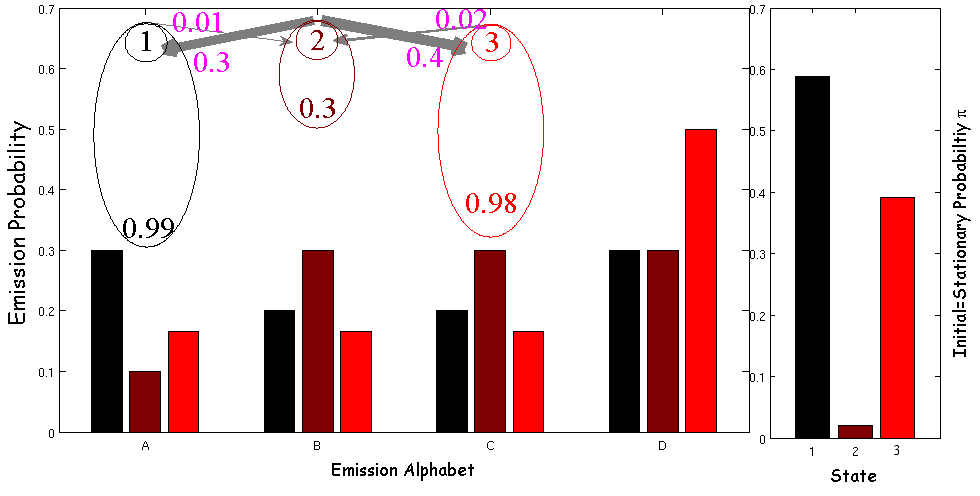
realisation of the three state
(S={1,2,3}) HMM with a four symbol emission alphabet ({A,B,C,D})
specified above is simulated in the stationary regime. In this toy
example, performance of several principled path decoders is
illustrated. Nameley, below we consider the Viterbi (MAP), PMAP
("optimal accuracy"/BCJR implemented in Bahl L, Cocke J, et al. 1974),
PairwiseMAP (suggested by L. Rabiner in his
popular 1986 tutorial on HMMs), PVD ("Posterior Viterbi", used in
Fariselli P, Martelli P, et al. in 2005), ConstrainedPMAP (i.e.
admissible optimal accuracy, used in Käll L, Krogh A, et al. 2005),
ViterbiPMAPHybridK2 (introduced in A generalized risk-based
approach to segmentation based on hidden Markov models, where all of these and others
decoders are discussed in detail).
A stream of plain text output of the six decoders as well as the ground
truth state sequence/path are presented in here.
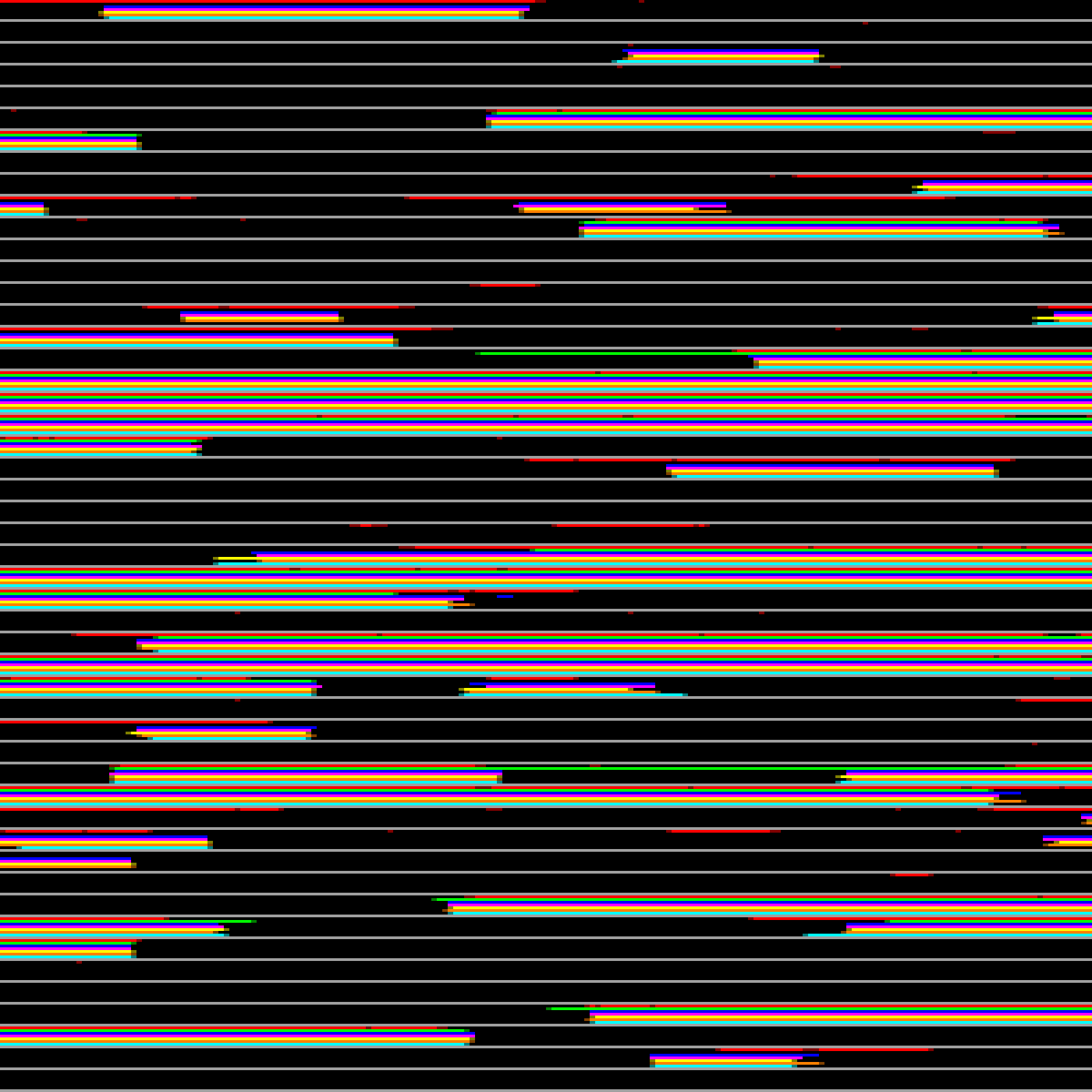
The 10000
long stream is also presented below as a
color-coded raster scan image
of 50 rows of 200 symbols. The rows are separated by grey
borderlines and the color code, the overall as well as individual state false negatvie error rates, and log-posterior probability rates are
given in the Table below.
| Source
\ State |
1
|
2
|
3
|
Error rate
(100%)
|
Miss 1(100%)
|
Miss 2(100%) |
Miss 3(100%) |
Log-probability
rate
|
Truth
|
|
|
|
0
|
0
|
0
|
0
|
-1.4080
|
Viterbi (MAP)
|
|
|
|
12.68
|
3.23
|
98.86
|
27.93
|
-1.3525
|
PMAP (optimal
accuracy)
|
|
|
|
8.38
|
3.5
|
100
|
13.63
|
-∞ |
PairwiseMAP
|
|
|
|
8.4
|
3.46
|
100
|
13.79
|
-∞ |
Posterior Viterbi
|
|
|
|
8.67
|
3.64
|
97.14
|
14.43
|
-1.3595
|
ConstrainedPMAP
|
|
|
|
8.55
|
3.61
|
97.71
|
14.08
|
-1.3603
|
ViterbiPMAP_HybridK2
|
|
|
|
9.07
|
3.32
|
97.14
|
16.36
|
-1.3567
|
Borderline
|
|
|
|
|
|
|
|
|
Beware the colour interference (e.g.
alteration of green in the presence of red neighbours) when viewing the
raster scan.
Note that state 2 is always half as bright as state 3 which makes it
easier to distinguish admissible (positive probability) and
inadmissible (zero probability) paths. Note also that togeather
with the Viterbi decoders, the last three decoders (PV, Constrained
PMAP, and the 2-block hybrid of the Viterbi and PMAP decoders) are
guaranteed to produce admissible paths. In this example, the PMAP and
PairwiseMAP despite their overall accuracy, always fail to detect state
2, implying inadmissibility of the resulting paths.
While the
variation in the performance among these decoders might appear somewhat
limited in this simple example, it is expected to grow with the
complexity of the model. Also, the overall pointwise
error rate is certainly not the only measure of accuracy. Indeed,
state-specific as well as region-based performance measures are
commonly used, for example, in computational biology. Since for
region-based measures it is generally not possible to derive an
efficient optimal decoder, the richness of the family of hybrid
decoders, such as the 2-block hybrid of the Viterbi
and PMAP decoders
(ViterbiPMAP_HybridK2), may prove useful. The
situation becomes even more interesting when the individual states of a
complex model are aggregated into label classes and optimal label paths
are required in addition to optimal state paths. Other factors
making further investigation of such decoders interesting are 1)
availability of partial annotations, which would require appropriate
constraining 2) path sampling for identification of alternative
structures/signals.

Alexey Koloydenko
7/08/2010